Wrist Camera
Topic outline
-
Locate objects the fastest and easiest way with Robotiq’s Wrist Camera! The following introductory video will present you the Wrist Camera, defined by the Visiion and Vision System. The Vision System uses the Robotiq Wrist Camera and the URCap software on Universal Robots to provide you with a simple object teaching interface. The interface allows to set up the Vision System so it can recognize object locations and orientations automatically. The Camera is designed to work in industrial applications in combination with the Robotiq Hand-E, 2F-85 and 2F-140 Adaptive Grippers. Get a glimpse of what the Wrist Camera can do to help you automate your robotic tasks faster!
-
-
As you are now becoming a Pro with using all features and nodes of Robotiq’s Wrist Camera, it is time to program your first pick and place task using the Advanced Parameters! Robotiq Pro Marc-Antoine Gauthier will guide you through the steps to use the Wrist Camera
What You Will Need to Install Your Wrist Camera
- Robotiq Wrist Camera
- End effector: Any Robotiq Gripper mounted on the robot
- Latest URCap: UCC-X.XX
- Universal Robots PolyScope software version 3.5+ or 5.1+
- Universal Robots UR3, UR5, UR10 or UR16
- 2 mm slotted screwdriver, 4 mm hex key
Pick & Place Programming with Wrist Camera PART 1
Pick & Place Programming with Wrist Camera PART 2
Related Documentation
Download the following program template with an application example to help you become a Pro!
 Wrist Camera Pick and Place Program Template
Wrist Camera Pick and Place Program Template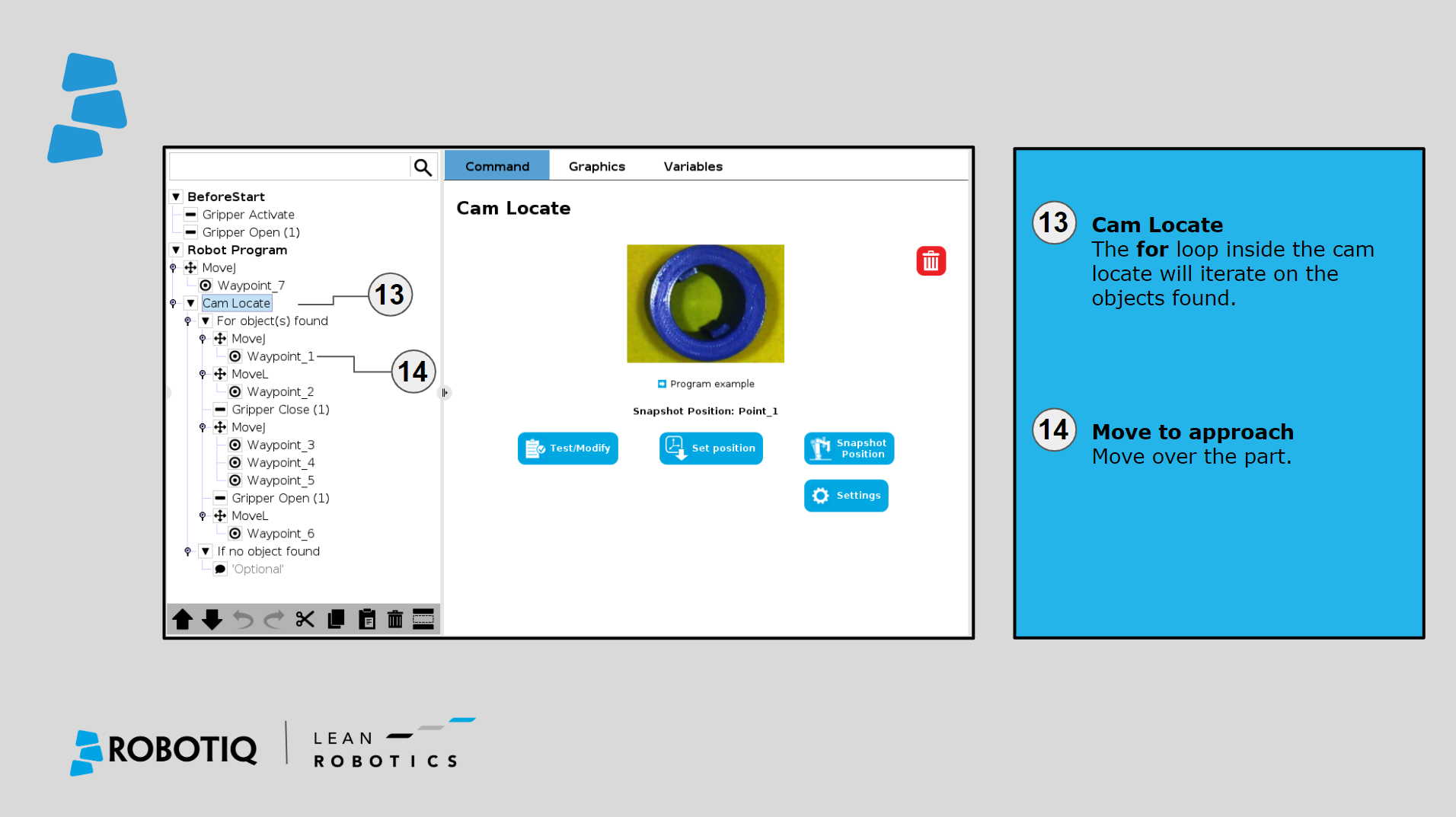
 Wrist Camera Program Template Explained
Wrist Camera Program Template ExplainedShare with your Peers!

Join the DoF Room to discuss this lesson. Ask questions and get answers from the Pros!
Join Here!
-