Adaptive Grippers
Topic outline
-
-
The following lesson will guide you through the steps of developing your pick and place program using Adaptive Grippers.
What Is Provided in This Lesson:
•Setting the TCP orientation of the Grippers
•Best practice to switch between Grippers in your robot programRelated Documentation
Download the program template to help you become a Pro! It explains the sample application program used in this lesson's video.
 Pick and Place with Dual Gripper Template
Pick and Place with Dual Gripper Template 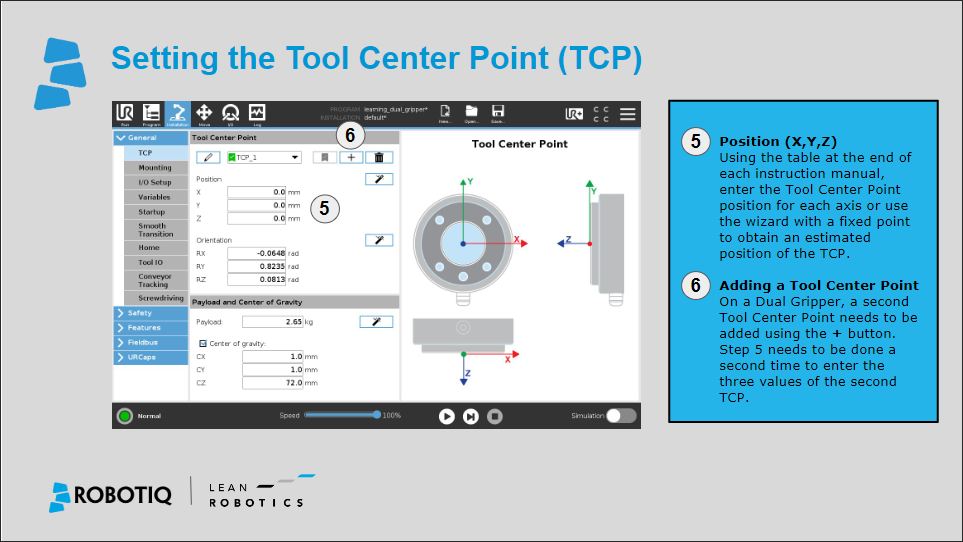
-