Adaptive Grippers
Topic outline
-
-
As your Dual Grippers are now set, now is the time to start programming and setting both the payload and tool center point! Application Expert Mathieu Bélanger-Barrette guides you through the steps of setting the payload and the tool center point with two Robotiq Hand-E Grippers mounted on e-Serie Universal Robots.
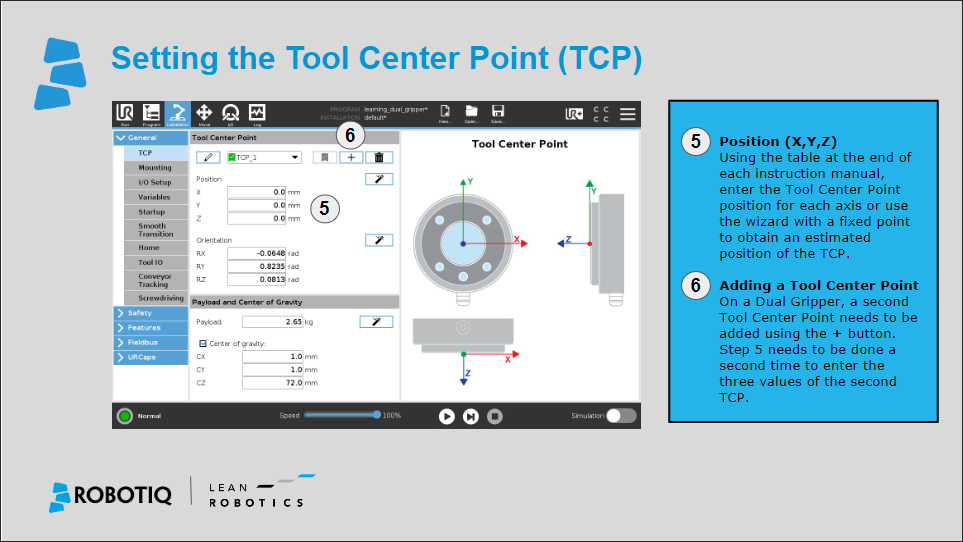
How to Correctly Configure a Dual Adaptive Gripper on e-Series:
- Using the wizard will help you set the payload of any Gripper configuration
- Setting the tool center point (TCP) for each gripper of a Dual Gripper configuration
How to Set the Payload & TCP
Related Documentation
Download the program template to help you become a Pro! It explains the sample application example program used in this lesson.
 Dual Gripper Program Template Explained
Dual Gripper Program Template Explained
-