Adaptive Grippers
Topic outline
-
-
Now is the time to do your first program with a Robotiq Gripper! The following lesson will guide you through the steps of developing your pick and place program using Robotiq Adaptive Grippers.
- Create a simple pick and place program
- Configure the Gripper Action node
- Use the Grip Check node to validate the picking sequence
- Optional: Use Force Copilot's Find surface node to place the object
How To Program a Pick & Place with Adaptive Grippers
Related Documentation
Download the program templates to help you become a Pro! It includes the sample application example program used in this lesson's video.
 Pick and Place Program Template
Pick and Place Program Template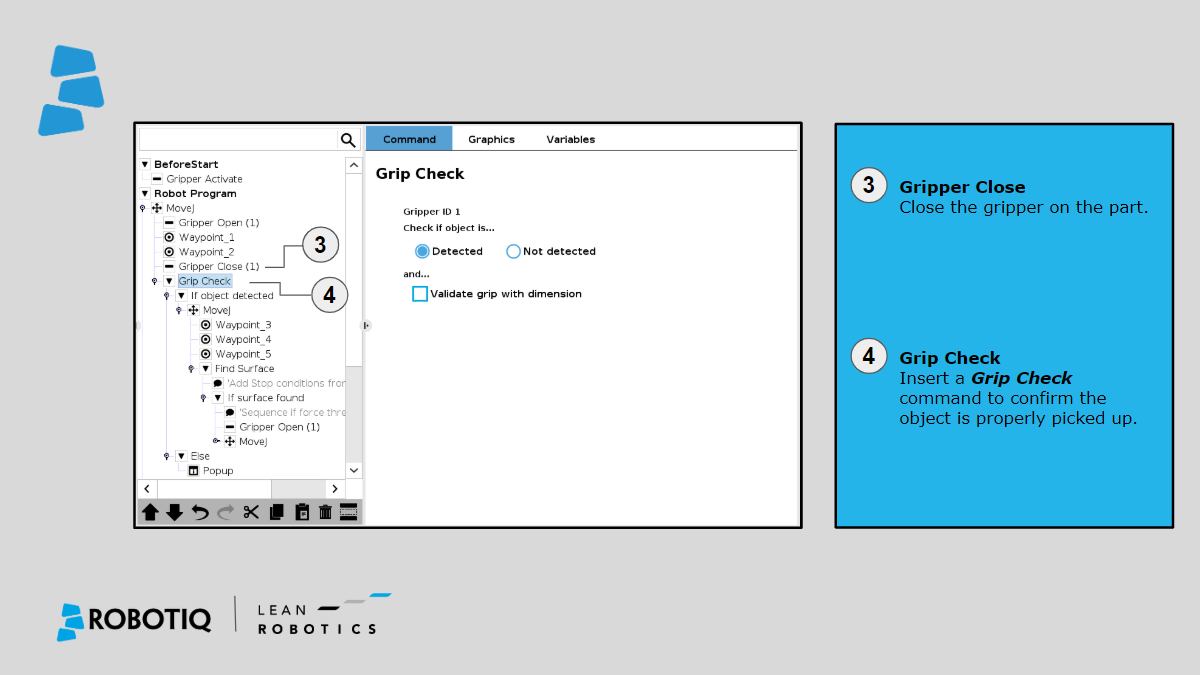
 Pick and Place Program Template Explained
Pick and Place Program Template Explained -
Test Your Knowledge on the Adaptive Grippers by taking this quiz.
-