Vacuum Grippers
Topic outline
-
-
Learn the basic steps to program your first pick and place application with the EPick and AirPick Vacuum Grippers on e-Series Universal Robots. Robotiq Coach Marc-Antoine Gauthier will guide you through the steps to follow to use the Vacuum Grippers. A program template for both EPick and AirPick is also available in the Related Documentation section below.
What You Will Need to Install Your Vacuum Grippers
- Robotiq Vacuum Gripper (EPick and/or AirPick)
- Latest URCap Installed - UCG-X-XX
- Universal Robots UR3, UR5, UR10 or UR16
- EPick: Any non-porous flat surface object you have at hand (e.g.,i.e., flat metal plate)
- AirPick: Any non-porous flat surface object you have at hand (e.g.,i.e., cardboard box)
Programming Basics with EPick / AirPick
Related Documentation
Download the following program template to help you become a Pro! It explains the application example program used in this lesson's video.
 Vacuum Gripper Program Template
Vacuum Gripper Program Template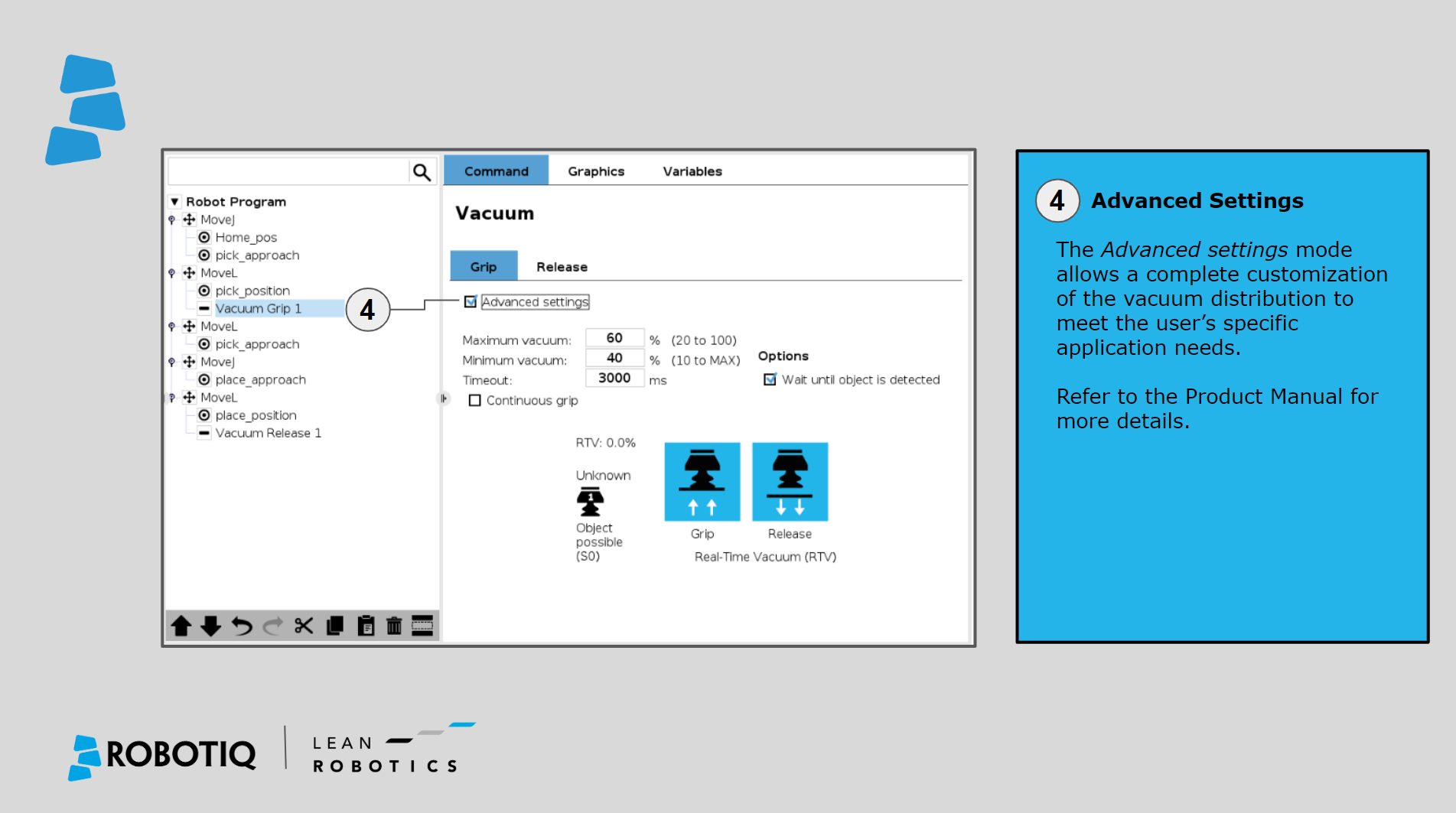
 Vacuum Gripper Program Template Explained
Vacuum Gripper Program Template Explained
-